Depth Of Field 2 (Advanced DOF)
Posted by Go crazy for anything that will make you smile.
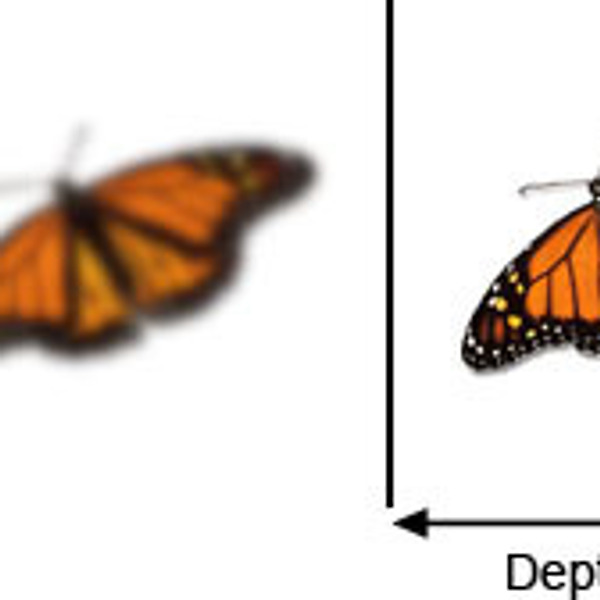
이전 글 참고 : http://mgun.tistory.com/1388 이전글에 이어서 Advanced Depth Of Field를 언급한다. Depth of Field의 구현. 1. destination alpha(출력 알파) 채널에 per pixel depth와 blurriness 정보를 저장한다. 2. post processing을 위한 pixel shader . a. 이미지를 downsample해서 pre blur한다. b. COC 근사치를 위해 다양한 크기의 필터커널을 사용한다. c. 더 나은 이미지 품질을 위해 원본과 pre blurred한 이미지를 섞는다. d. 또렷한 전경값이 블러 원경으로 쓰이는 것을 측정해서 방지한다. 위의 내용이 핵심이다. 이 개념을 실제로 옮겨 보자. 1. destin..